











































































































































技術中心2025-03-14
在數控加工中,工件坐標系確定之后,還必須確定刀位點在工件坐標系中的位置即對刀。目前,數控機床加工之前的對刀大多采用手動試切,靠人工控制,因此準備工時長、對刀精度不穩定。本文試探討在機床數控系統軟件支持下,增設一個相對獨立的自動對刀程序模塊來實現簡易的自動對刀控制。
一、自動對刀系統及實現機理
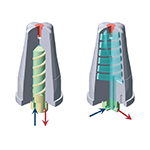
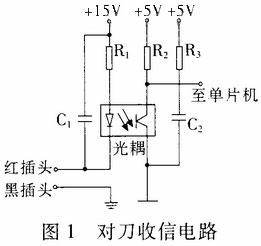
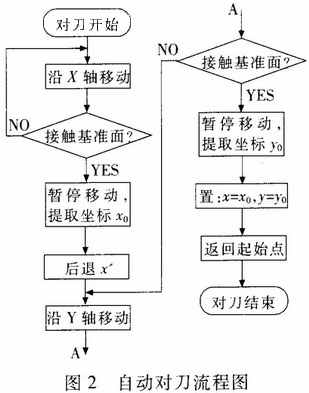
自動對刀系統由對刀控制裝置和自動對刀儀組成,配合機床數控系統使用。自動對刀儀由對刀收信電路(圖1)和標準對刀棒組成。對刀的工作原理是連續自動進給收信方式。這一過程是在編輯狀態下,由鍵盤發出對刀指令,經對刀控制裝置識別處理后,傳給機床數控系統的指定驅動單元,控制刀具向標準對刀棒表面自動定位尋邊運動。在刀尖觸及對刀棒表面的瞬間,傳感器上的高電平通過刀尖對地產生負跳變,該信號發向對刀控制裝置引起中斷程序控制機床數控系統伺服機構停止運動:計算機提取該軸對刀基準點的坐標數據后及時后退一定的距離:然后沿另一坐標方向繼續作定位尋邊運動,以便再次引起中斷并記取此軸對刀基準點的坐標數據,經計算后作為預設工件坐標系的零點。尋邊定位對刀的實現流程如圖2所示。
二、自動對刀儀
自動對刀儀的標準對刀棒是作為對刀尺寸基準的傳感部件,由芯軸、絕緣套、對刀圈三部分組成。對刀圈結構應根據車削與鎖銑加工的對刀方式不同,采用不同的設計。
1.數控車床用對刀儀
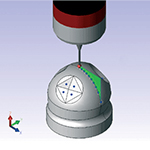
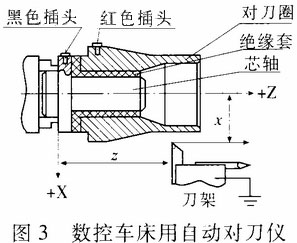
應充分考慮車刀的多樣性及其測量誤差對加工精度的影響。故將對刀圈設計成具有外圓、內孔及內外錐面的四個測量表面(圖3)。它們分別用于對外圓車刀、內孔車刀和端面車刀等刀具進行刀位點的位置測量。其對刀操作步驟非常便捷,先用點動方式將車刀移至對刀圈外圓附近,然后直接啟動自動對刀程序,刀具便進行自動對刀運動。該對刀儀在開環數控車床上使用時,應考慮消除傳動間隙所產生的對刀誤差。為此可在流程圖中插入消隙過程,即當刀具按照指定要求后退x′ 以后,再讓其沿X軸前進一個△x的距離(△x < x′),然后執行下一步流程。
2.加工中心用對刀儀
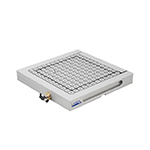
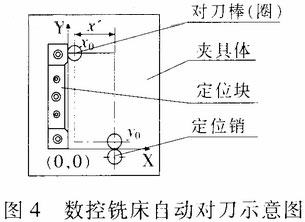
需要鏜銑加工的零件,特別是孔類零件,其對刀方式通常是利用已加工的定位孔或基準線、面作為定位基準。批量生產中,工件采用夾具進行定位安裝,常用的定位方式是“一面兩銷”或“兩面一銷”方式。以立式數控銑床為例,夾具在Z坐標的位置基本上是通過加工程序來確定的,因此,只要在XY平面上找到定位塊的定位基準坐標后,將對刀取得的基準點坐標數據經一定計算后作為預設工件坐標系的原點(用G54等指令確定)即可。圖4所示的是針對“兩面一銷”定位形式的夾具對刀方法。其尋邊方式是:先用基準直徑為D的標準對刀棒找到X向定位塊的右邊界,記下此時X軸坐標值x0,在保持Y坐標不變的情況下按X為-向后退一個給定值x′,然后沿Y軸向下尋邊找到Y坐標定位銷的上邊界,記下此時Y軸坐標值)y0,則
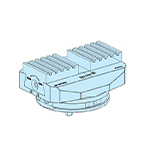
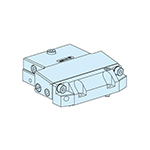
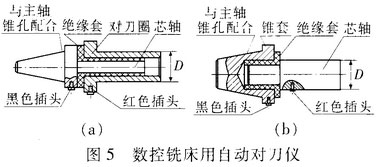
 即為確定的工件坐標系原點。該種對刀棒的傳感元件僅需一個外圓測量表面,用于對線面一類的定位元件進行位置測量。在設計對刀棒時,應根據機床主軸內錐孔的大小,采用不同的組裝結構(見圖5a、5b)。
即為確定的工件坐標系原點。該種對刀棒的傳感元件僅需一個外圓測量表面,用于對線面一類的定位元件進行位置測量。在設計對刀棒時,應根據機床主軸內錐孔的大小,采用不同的組裝結構(見圖5a、5b)。
?
三、自動對刀儀的定位精度分析
從理論上講,自動對刀儀由于采用電信號位置檢測,能使對刀誤差控制在一步(0.005~0.01 mm )之內。但實際上所能得到的測量精度不完全取決于所配套數控系統的分辨率,還和機床傳動系統誤差和對刀棒的幾何形狀、加工精度和裝配質量等因素有關對于機床傳動誤差(主要指車床開環控制系統),可通過軟件來控制消除機床傳動間隙的影響;在標準對刀棒的設計和制造過程中應充分注意測量精度的要求,嚴格控制加工與裝配誤差,保證對刀精度。






